高中 | 传感器及工作原理 题目答案及解析
稿件来源:高途
高中 | 传感器及工作原理题目答案及解析如下,仅供参考!
选修3-2
第六章 传感器
6.1 传感器及其工作原理
传感器及工作原理
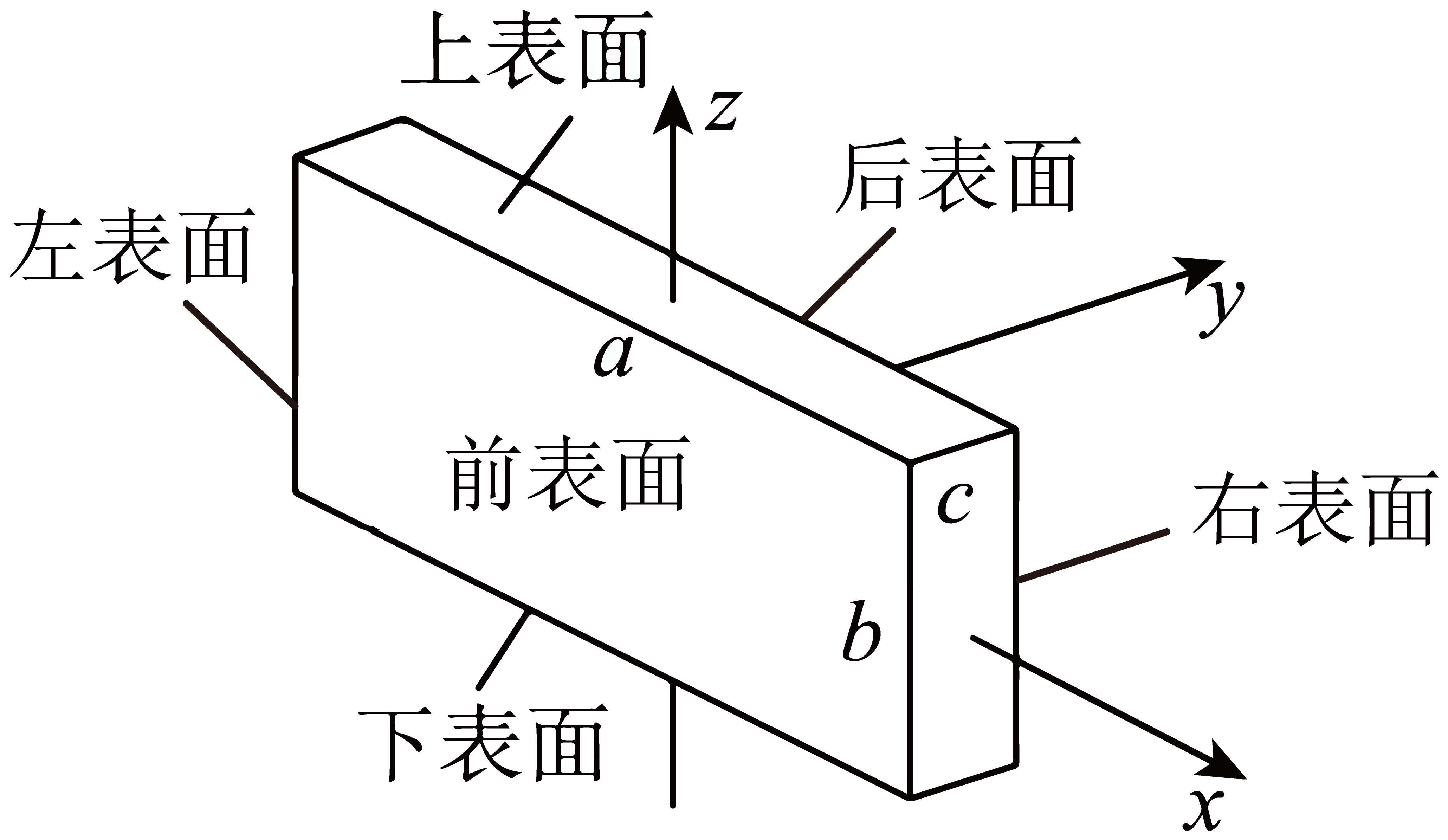
在物理学中,载流子指可以自由移动的带有电荷的微粒,如电子和离子。例如,金属材料的载流子为电子。现代广泛应用的半导体材料分为两大类:一类是$N$型半导体,其载流子是电子;另一类是$P$型半导体,其载流子称为“空穴”,相当于带正电的粒子。半导体材料中载流子定向移动时,呈现出与电子在金属导体中类似的规律。如图甲所示,一个长方体$P$型半导体材料,长、宽、高分别为$a$、$b$、$c$,且$a \gt b \gt c$。将其置于$+y$方向的匀强磁场中,磁感应强度大小为$B$。当$+x$方向通以大小为$I$的电流时,在某两个表面出现的电压大小为$U_{H}$,与$I$、$B$的关系为:$U_{{H}}=k\dfrac{IB}{x}$,其中,$k$为材料的霍尔系数,只与材料的性质有关;$x$的单位是米($\:\rm m$)。
实验可以测得$(\qquad)$
前表面比后表面电势高
","上表面比下表面电势高
","后表面比前表面电势高
","下表面比上表面电势高
"]长方体是$P$型半导体,载流子是正电荷,根据左手定则,正电荷向上偏,则上表面带正电,则上表面比下表面电势高。
故选:$\rm B$;
$k$的单位用国际单位制的基本单位,可表示为 ;
根据$U_{{H}}= k\dfrac{IB}{x}$,有$1{\;\rm V=1}k\;\rm \dfrac{{AT}}{{m}}$,又$1\;\rm V=1\;\rm A\Omega$,根据$q=\dfrac{\Delta\Phi}{R}=\dfrac{\Delta BS}{R}$,推得$1\;\rm \Omega\text{=1}\;\rm \dfrac{{Tm}^{2}}{{As}}$,联立解得${1\ \rm A}{\;\rm \dfrac{{Tm}^{2}}{{As}}}= 1k\;\rm \dfrac{{AT}}{{m}}$,解得$1k =1\;\rm \dfrac{{m}^{3}}{{As}}$;
$x=(\qquad)$
$a$
","$b$
","$c$
","$\\dfrac{bc}{a}$
"]根据平衡关系$qvB= \dfrac{U_{{H}}}{b}q$,又因为$I=nqvS$,$S=bc$,解得$U_{{H}}=\dfrac{BI}{nqc}$,又$U_{{H}}= k\dfrac{IB}{x}$,因为$x$的单位是米($\:\rm m$),联立解得$x=c$。
故选:$\rm C$;
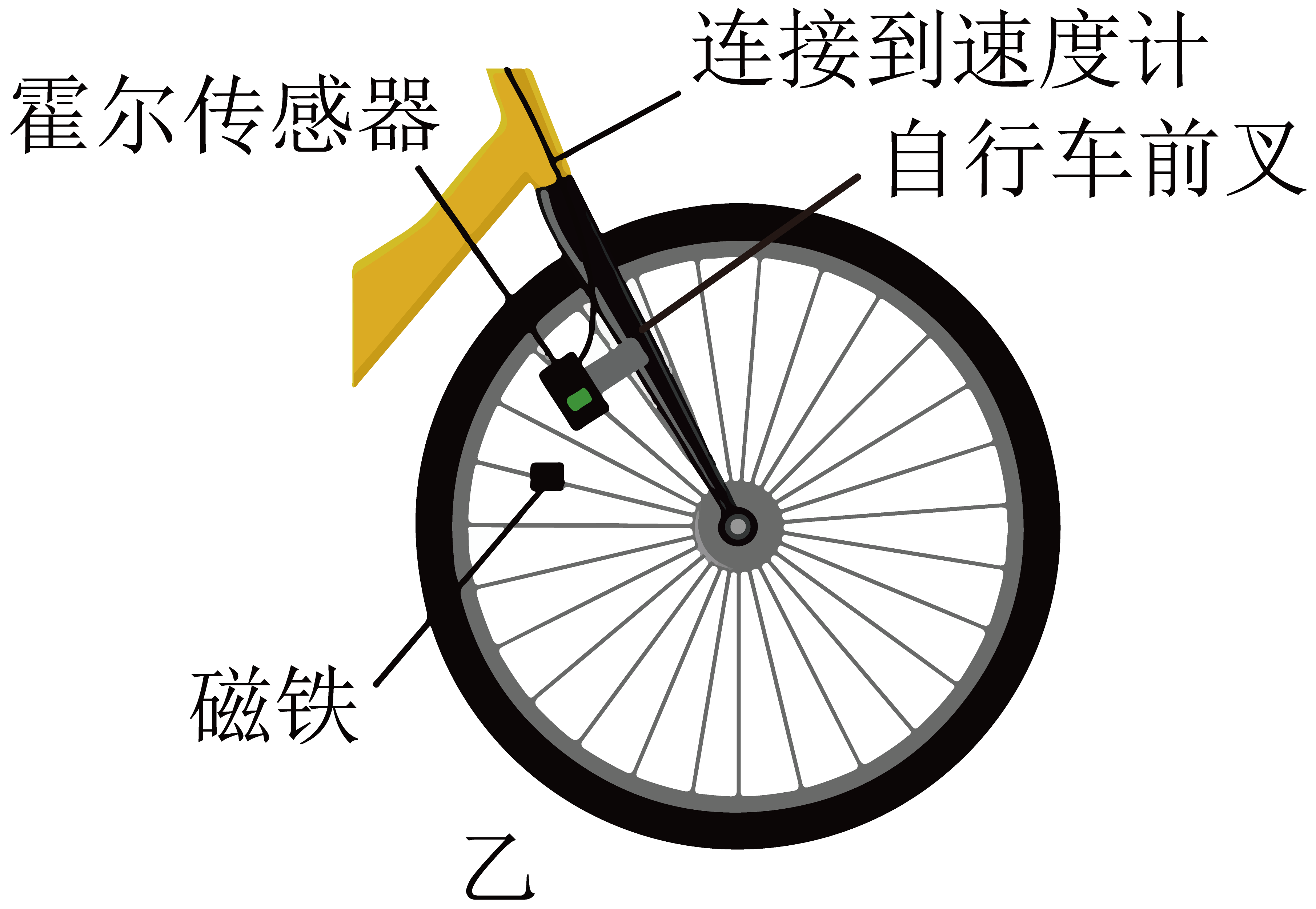
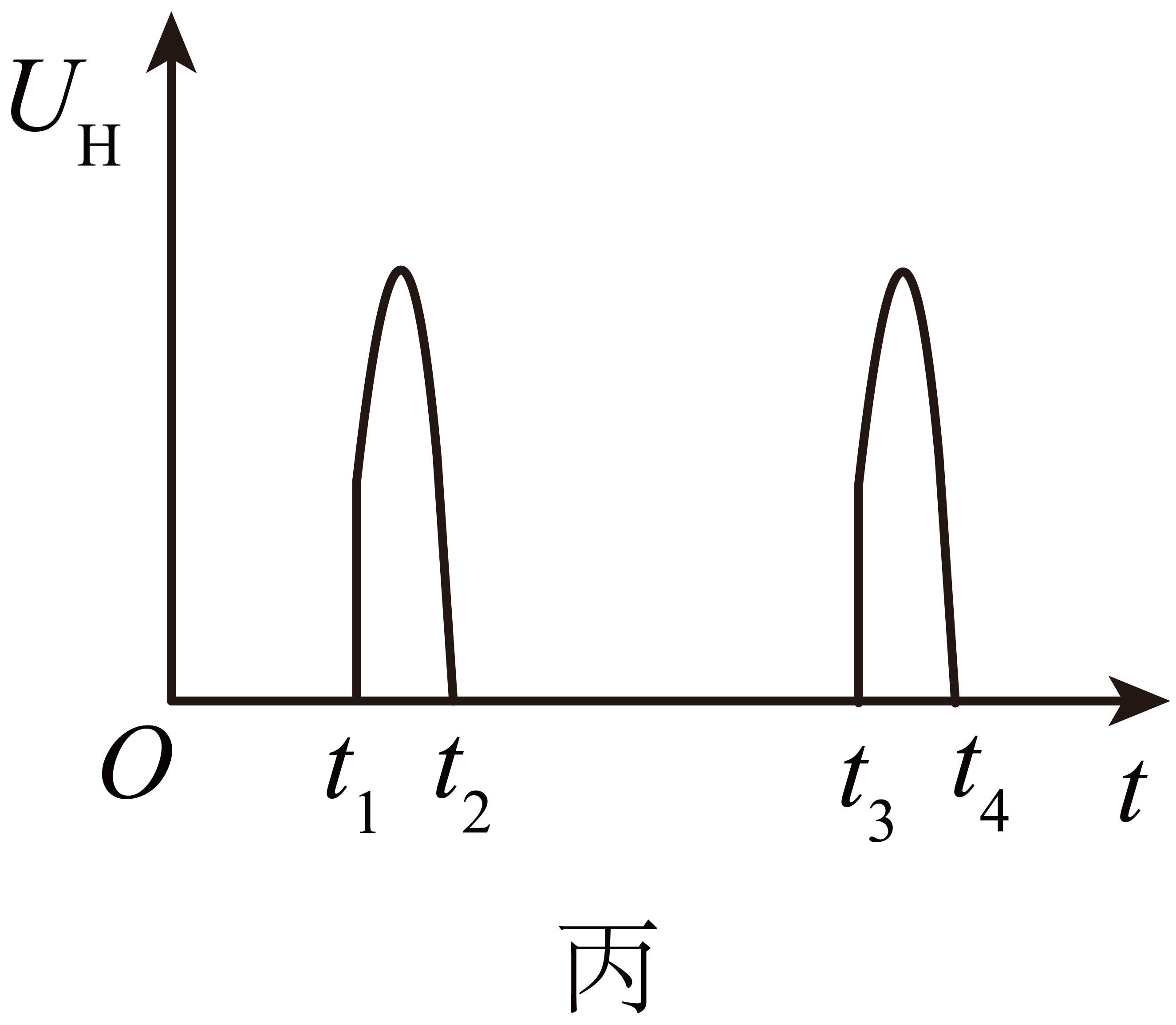
霍尔元件可用于自行车速度计。如图乙所示,将霍尔元件固定在自行车前叉上,由干电池提供电流(干电池内阻与半导体材料相比可忽略不计),磁铁安装在前轮辐条上,轮子每转一圈,磁铁就靠近霍尔传感器一次,传感器就会输出一个脉冲电压。某次行驶时,霍尔传感器测得的电压$U_{H}$随时间$t$变化关系如图丙所示。车轮半径为$R$,霍尔传感器离轮轴距离为$r$。
①自行车的速度可表示为 (用题目所给的物理量表示);
②若前轮漏气,骑行速度的测量结果
$\rm A$.偏大 $\rm B$.偏小 $\rm C$.不受影响
③为了获得最大的$U_{H}$,电流方向可沿 方向,磁场方向可沿 方向。
$\rm A$.$±x$ $\rm B$.$±y$ $\rm C$.$±z$
根据图乙可知自行车转动一周所需的时间$t=t_{3} − t_{1}=t_{4} − t_{2}$
则自行车的速度可表示为$v=\dfrac{2\pi R}{t_{3}-t_{1}}=\dfrac{2\pi R}{t_{4}-t_{2}}$
若前轮漏气,则因漏气而使车轮半径减小,从而使速度计测得的骑行速度偏大;
故选:$\rm A$;
根据平衡关系$Bqv=q\dfrac{U_{{H}}}{d}$,解得$U_{H}=Bvd$,故$d$越大,$U_{H}$越大,为了获得最大的$U_{H}$,则$d=a$,粒子会向左右表面偏转,根据左手定则判断知,电流方向可沿$±y$方向,磁场方向可沿$±z$方向。
高中 | 传感器及工作原理题目答案及解析(完整版)
